
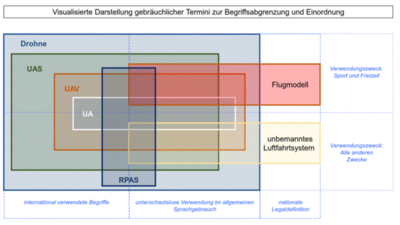
Unbemannte Luftfahrtgeräte werden umgangssprachlich meist als "Drohne" bezeichnet.[1] Von der Europäischen Agentur für Flugsicherheit, der European Aviation Safety Agency (EASA), wird die Bezeichnung als Oberbegriff für jegliches unbemannte Luftfahrzeug, d.h. ohne einen Piloten an Bord, das entweder vollautomatisiert oder von Menschenhand ferngesteuert wird, verwendet.[2] Der Begriff umfasst dabei nur das Fluggerät als solches, d.h. den fliegenden Teil, nicht dagegen die Steuer- und Kontrollstation am Boden. Eine Legaldefinition stellt der Terminus "Drohne" nicht dar. Auch in dem vorliegenden Gutachten wird der Begriff "Drohne" als Oberbegriff verwendet, um damit alle Abstufungen, Differenzierungen und nicht näher abgegrenzten unbemannt fliegenden Objekte und Gegenstände unabhängig von ihrem Nutzungszweck zu beschreiben.
Das nationale Luftverkehrsgesetz (LuftVG) verwendet für Drohnen die Gesetzesbegriffe "Flugmodell", § 1 Abs. 2 Satz 1 Nr. 9 LuftVG, und "unbemanntes Luftfahrtsystem" (UAS), § 1 Abs. 2 Satz 3 LuftVG. Als unbemanntes Luftfahrtsystem wird in § 1 Abs. 2 Satz 3 LuftVG ein unbemanntes Fluggerät einschließlich einer Kontrollstation bestimmt, das nicht zu Zwecken des Sports oder der Freizeitgestaltung betrieben wird. Davon werden nach dem Nutzungszweck sog. Flugmodelle, § 1 Abs. 2 Nr. 9 LuftVG, abgegrenzt, bei denen es sich entsprechend der Bestimmung in § 1 Abs. 1 Nr. 8 der Luftverkehrs-Zulassungs-Ordnung (LuftVZO) um unbemannte Luftfahrzeuge handelt, die in Sichtweite des Steuerers ausschließlich zum Zweck des Sports oder der Freizeitgestaltung betrieben werden.
Im Englischen finden sich für eine Drohne die Bezeichnungen "Unmanned Aerial Vehicle (UAV)"[3] oder "Unmanned Aircraft" (UA) oder die neuere Bezeichnung "Unmanned Aircraft System (UAS)"[4] wieder. Die Begriffe umfassen sowohl die programmierte als auch die ferngesteuerte Variante des Geräts (remotely piloted version, RPV). Mit dem Begriff Unmanned Aircraft System (UAS) wird dabei wie mit dem deutschen Gesetzesbegriff des unbemannten Luftfahrtsystems i.S.v. § 1 Abs. 2 Satz 3 LuftVG ein gesamtes Luftfahrzeugsystem bezeichnet, d.h. neben dem Fluggerät selbst eine Bodenkontrollstation und die Art der Bedienung. Die Abkürzung UAS soll in dem hiesigen Gutachten daher auch für den Gesetzesbegriff des unbemannten Luftfahrtsystems i.S.v. § 1 Abs. 2 Satz 3 LuftVG verwandt werden.
Die Internationale Zivilluftfahrtorganisation (ICAO) hat offiziell den Begriff des "Remotely Piloted Aircraft System (RPAS)" eingeführt und klargestellt, dass es sich dabei um einen Typen bzw. eine Unterkategorie einer Drohne handelt.[5] Der Schwerpunkt dieser Bezeichnung liegt in der Fernsteuerung. Die ICAO nutzt die Bezeichnung gleichermaßen für unbemannte Luftfahrtsysteme und Flugmodelle im Sinne des deutschen Luftverkehrsrechts.[6] Der Begriff wird auch von EU-Organisationen, wie der Europäischen Flugsicherungsorganisation "Eurocontrol" gebraucht.[7]
Ein einheitlicher Sprachgebrauch ist in europäischen Institutionen und Organisationen noch nicht festgelegt.[8] Für sowohl zivile als auch für militärische Drohnen existiert lediglich eine allgemein gehaltene Begrifflichkeitsabgrenzung.[9] Abgesehen von den Gesetzesbegriffen des LuftVG finden die o.g. Begriffe im allgemeinen Sprachgebrauch sowie etwa in wissenschaftlichen Publikationen und in der medialen Darstellung vielfach unterschiedslos Anwendung (vgl. Übersicht gebräuchlicher Termini zur Begriffsabgrenzung, siehe Abbildung 2).[10]
__________________________________________________________________________________
[1] Vgl. Bierman, Kai; Wiegold, Thomas: Drohnen Chancen und Gefahren einer neuen Technik, Berlin 2015, S.198.
[2] Vgl. EASA, A-NPA 2015-10, 2015, S.4; EASA, Concept of Operations for Drones, 2015, S.2; European Commission: Remotely Piloted Aviation Systems (RPAS) – Frequently Asked Questions MEMO/14/259, Brüssel/Belgien, 2014, S. 1; Kornmeier, 2012, S.9.
[3] Boucher, Philip: JRC Science and Policy Reports, Civil Drones in Society, Societal and Ethics Aspects of Remotely Aircraft Systems, Ispra/Italien, 2014, S.29.
[4] ICAO: LC/36-WP/2-4 Working Paper Legal Committee– 36th Session – (Montréal, 30 November to 3 December 2015). Agenda Item 2: Consideration of the General Work Programme of the Legal Committee. Study of legal Issues Relating to Remotly Piloted Aircraft, Montréal/Kanada, 2015, S.1, 7, 8, 11.
[5] Vgl. ICAO, Annex 7 to the Convention on International Civil Aviation. Aircraft. Nationality and Registration Marks, Montréal/Kanada, 2012. S.2.
[6] Vgl. ICAO, AN-Conf/12-IP/30 5/10/12. Twelth Air Navigation Conference. Montréal, 19 to 30 November 2012. Agenda Item 4: Optimum capacity and efficiency – through global collaborative ATM. 4.2: Dynamic management of special use airspace. The Integration of Remotely Piloted Aircraft Systems (RPAS) into Civil Airspace, Montréal/Kanada, 2012, S.1.
[7] Vgl. Joint Authorties for Rulemaking of Unmanned Systems (JARUS): Working Group 6 – Safety & Risk Asessment. AMC RPAS.1309. Issue 2. Safety Assessment of Remotely Piloted Aircraft Systems, o.O., 2015, S.1; Vgl. auch: Blyenburgh, RPAS, 2016, S. 15; Die auf europäischer Ebene arbeitenden Organisationen und Arbeitsgruppen (JARUS, EASCG, SESAR JU, EC, EUROCONTROL) verwenden ebenfalls diesen Begriff zur weiteren inhaltlichen Arbeit, um regional (EU Ebene) und global Gesetze und Regularien zu harmonisieren.
[8] Vgl. European Commission: Communication from the commission to the European Parliament and the Council. A New Era for Aviation, Brüssel/Belgien, 2014, S.2ff.; Seit diesem Jahr wird jedoch auf europäischer Ebene der Begriff RPAS in allen Arbeitsgruppen verwendet, Vgl. Blyenburgh, CURPAS, 2016, S.3.
[9] Vgl. § 1 Abs. 2 LuftVG.
[10] Obwohl die ICAO die Begrifflichkeiten UA, UAV, UAS und RPAS voneinander per Definition abgrenzt, finden diese Termini egalitär in diversen Publikationen der letzten Jahre Anwendung. Siehe dazu: Kapitel 1.4 Stand der Forschung.
Drohnen besitzen unterschiedliche Fähigkeitsmerkmale; diese determinieren in der Folge die Anwendungsmöglichkeiten. Die technischen Fähigkeiten von Drohnen sind Ergebnis des Zusammenspiels von Einzelkomponenten verschiedener Technologien. Aus den daraus resultierenden Eigenschaften lassen sich Unterschiede skizzieren, die in der Folge Abgrenzungen ermöglichen. Beispielsweise dienen Gewicht und die Fähigkeit, in großen Höhen zu fliegen, als Unterscheidungsmerkmal. Differenzierungskriterien können aber auch aerodynamische Beschaffenheit und Flugeigenschaften sein oder die Nutzung von Kommunikation, Datenaustausch und Verfolgen komplexer Aufträge.[1]
__________________________________________
[1] Vgl. Gupta, Suraj; Ghonge, Mangesh; Jawandhiya, Pradip: International Journal of Advanced Research in Computer Engineering & Technology (IJARCET), Volume 2, Issue 4, 2013, o.O./Indien, 2013, S.2-4.
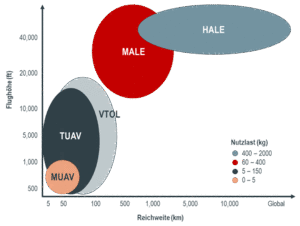
Innerhalb der letzten zehn Jahre haben sich im Wesentlichen drei Komponenten zur Beschreibung einer Drohne als Systemherauskristallisiert, wobei die Betonung auf dem Gesamtsystem als funktionsfähiger Einheit lag. Das beschriebene System in seiner Gänze besteht aus verschiedenen Komponenten, wobei das Fluggerät mit seinen fliegerischen Eigenschaften als eine Komponente zählt[1] und dem die Bedeutung einer Trägerplattform innewohnt. Ergänzt wird diese erste Komponente um die der Kommunikationsinfrastruktur und der Bodenkontrollstation, die das funktionale System ergänzen. Ein UAS beinhaltete somit das Fluggerät mit einer GCS (Ground Control Station)[2] und der dazugehörigen ICT (Information and Communication Technology)[3]. Die Unterscheidungsmerkmale der Fluggeräte orientierten sich dabei stets an militärischen Systemen. Als wesentliche Merkmale wurde Reichweite, Flughöhe, Flugdauer und maximales Startgewicht beschrieben.[4]
Die Flughöhe und die Reichweite dienten auch für den zivilen Sektor zur Kategorisierung. Diese Systematik spiegelte sich jedoch nicht in der Bezeichnung der Fluggeräte wider, wie die nachstehende Abbildung 3 von 2007 zeigt, die noch 2011 in der wissenschaftlichen Aufbereitung Gültigkeit besaß.[5]
Diese ersten Kategorisierungsversuche waren nicht einheitlich. Weitere Abstufungen wurden daher in dieser Systematik vorgenommen, um das gesamte Spektrum an Fluggeräten detaillierter abzugrenzen.[6]
Noch 2011 ging man davon aus, dass eine Integration von Drohnen in den Luftraum innerhalb der folgenden fünf bis acht Jahre abgeschlossen sein würde.[7] Als wichtigster Bestandteil für eine funktionale Integration würde die Implementierung eines "Sense & Avoid"[8] Systems als Schlüsseltechnologie den Grundstein legen.[9]
Vor fünf Jahren wurde außerdem noch davon ausgegangen, dass militärische Fluggeräte einen "dual use" dadurch erfüllen könnten, als dass bereits entwickelte Fluggeräte für zivile Anwendungen eingesetzt werden würden.[10] Die wirtschaftliche Prosperität sollte so in kürzester Zeit gesteigert werden. Dies beruhte auf der Erfahrung, dass auf militärischer Basis entwickelte Technologien stets Treiber für zivile Applikationen waren, was man in der Folge auch für die unbemannte Luftfahrt annahm. Professionell genutzte Systeme, die durch geschultes Personal bedient wurden, sollten auch in der Lage sein zivile Anwendungspotentiale zu erschließen.[11]
Heute lässt sich feststellen, dass die technische Entwicklung – besonders im Sport- und Freizeitbereich – anders verlaufen ist und breite Anwendungsspektren vor allem durch die Verbreitung von Flugmodellen zu erschwinglichen Preisen im Hobbysektor erschlossen wurden. De facto erhielten zivile Applikationen dadurch einen Schub, dass viele der wenig komplexen Drohnentechnologien auch von ungeübten Personen angewendet werden können.
Entwicklungstechnisch lässt sich der rasante Zuwachs an Flugmodellen im Hobby- und Freizeitbereich auf die Technologie der bürstenlosen Motoren zurückführen.[12] Diese Elektromotoren weisen aufgrund der fehlenden Reibung kaum noch Verschleißerscheinungen auf und sind kostengünstig für den Massenmarkt produzierbar. Die Motoren setzten sich auch im Modellbaubereich schnell durch. Mit ihnen ist es möglich, verschiedene Geräte funktional und preiswert zu entwickeln und funktionale Multikoptersysteme industriell zu fertigen.
Unbemannte Luftfahrtsysteme werden aufgrund rechtlicher Regelungen derzeit in zwei Kategorien unterteilt: Solche mit einem Gesamtgewicht von bis zu fünf Kilogramm und einem Gesamtgewicht von bis zu 25 Kilogramm.[13] Eine weitere Differenzierung anhand der übrigen Faktoren findet in der derzeitigen nationalen öffentlichen Diskussion derzeit kaum statt.[14]
Basierend auf diesen Grenzwerten orientierte sich auch die technische Entwicklung der letzten vier Jahre von Drohnen insgesamt. Die meisten am Markt verfügbaren Luftfahrzeuge [HK1] sind sogenannte RTF-Geräte (Ready to Fly). Alle Komponenten – inklusive der verbauten Nutzlast – sind hier so abgestimmt, dass ein funktionales, flugfähiges System besteht. Diese Systeme sind inklusive aller Komponenten im Handel zu erwerben, können sofort betrieben werden,[15] und sind am Markt am weitesten verbreitet. Diese Drohnen orientieren sich mit ihrer Gesamtnutzlast unterhalb der Gewichtsgrenze von fünf Kilogramm. In der Folge führte die Marktdurchdringung der Geräte unter fünf Kilogramm dazu, dass diese rechtliche Grenze als wichtigstes Unterscheidungsmerkmal wahrgenommen wird, wohingegen Flugmodelle von unbemannten Luftfahrtsystemen durch den Anwendungszweck abgegrenzt werden. Die Grenze von fünf Kilogramm war bis zum 20. Juli 2016 auch eines der wesentlichen Kriterien für die Erteilung einer Allgemeinerlaubnis zum Aufstieg von unbemannten Luftfahrtsystemen gemäß § 20 Absatz 1 Nummer 7 Luftverkehrs-Ordnung (LuftVO). Während damit einmalig eine Erlaubnis für Aufstiege unbemannter Luftfahrtsysteme für eine Dauer von bis zu zwei Jahren beantragt werden konnte, galt ab der Überschreitung der Gewichtsgrenze von fünf Kilogramm inkl. der Nutzlast die Erlaubnispflicht für jeden einzelnen Aufstieg mit einem unbemannten Luftfahrtsystem.[16] Dieses Erlaubnisverfahren bringt für Steuerer eines unbemannten Luftfahrtsystems einen größeren bürokratischen Aufwand mit sich. Dies ist auch ein Grund, dass nationale Hersteller unbemannter Luftfahrtsysteme für den gezielten Einsatz in der Industrie bei der Entwicklung unter anderem darauf achteten, das Gewicht von fünf Kilogramm Gesamtmasse nicht zu überschreiten.[17]
Die meisten der zurzeit am Markt verfügbaren Geräte lassen sich baulich vier Kategorien zuordnen, ohne dabei detaillierter auf Größe, Gewicht oder die Flugeigenschaften eingehen zu müssen:1. Drehflüglerfluggeräte sog. Multikopter oder Multirotorgeräte, 2. Flächenfluggeräte, 3. Hybride und 4. Sonstige.
____________________________________________
[1] Vgl. Skrzypietz, 2011, S.5.
[2] ebd..
[3] Kreowski, Hans-Jörg; Meyer-Ebrecht, Dietrich: Revolution in Military Affairs, Not without Information and Communication Technology, IS4IS Summit Vienna 2015, Wien, 2015, S.2-3.
[4] Vgl. Austin, 2010, S.4; vgl. auch: Kornmeier, 2012, S.13.
[5] Vgl. European Commission: ENTR/2007/065. Way forward, S.6; Skrzypietz, 2011, S.6.
[6] Vgl. Austin, 2010, S.4f.; vgl. auch: Kornmeier, 2012, S.13.
[7] Vgl. Skrzypietz, 2011, S.7.
[8] Sense & Avoid steht für Wahrnehmen und Ausweichen und beschreibt die technische Fähigkeit eines Fluggerätes, Objekte und Hindernisse wahrzunehmen und Maßnahmen zu ergreifen, diesen auszuweichen, um eine Kollision zu vermeiden. Vgl. Forlenza, Lidia: Vision based strategies for implementing Sense and Avoid capabilities onboard Unmanned Systems, Universita degli Studi di Napoli "Frederico II" Facolta di Ingeneria, Neapel/Italien, 2011, S.11-12.
[9] Vgl. ebd. Zur Implementierung sollte insbesondere ein internationales Projekt Mid Air Collision Avoidance System (MIDCAS) dienen, was als Grundstein für eine Luftraumintegration der aufgeführten Fluggeräte angesehen wurde.
[10] Vgl. Skrzypietz, 2011, S.7.
[11] Vgl. PriceWaterhouseCoopers: Global Market for Commercial Applications of Drone Technology Valued at over $127 bn, www.press.pwc.com, 09.05.2016, abgerufen am 10.05.2016 unter: press.pwc.com/News-releases/global-market-for-commercial-applications-of-drone-technology-valued-at-over--127-bn/s/AC04349E-C40D-4767-9F92-A4D219860CD2; Skrzypietz, 2011, S.11ff.
[12] Vgl. Dilger, Erik: Design und Implementierung eines konfigurierbaren Controllers zur Ansteuerung bürstenloser Motoren und Regelung von Echtzeitsystemen, Würzburg, 2013, S.3-9.
[13] In den NfL 1-786-16 wurde am 20. Juli 2016 die Neufassung der Gemeinsamen Grundsätze des Bundes und der Länder für die Erteilung der Erlaubnis zum Aufstieg von unbemannten Luftfahrtsystemen gemäß § 20 Absatz 1 Nummer 7 Luftverkehrs-Ordnung (LuftVO) veröffentlicht, die erstmals eine Gewichtsbegrenzung von bis zu 10 Kilogramm für die Erteilung einer Allgemeinerlaubnis von unbemannten Luftfahrtsystemen ohne Verbrennungsmotor festlegt. Die Neufassung der Gemeinsamen Grundsätze wurde zum Zeitpunkt dieses Gutachtens noch nicht umgesetzt, so dass sich die Auswirkungen dieser Grenze auf die öffentliche Diskussion noch nicht abschließend bewerten lassen. Vgl. dazu Phiesel, Daniel: Neufassung der Gemeinsamen Grundsätze des Bundes und der Länder für die Erteilung der Erlaubnis zum Aufstieg von unbemannten Luftfahrtsystemen gemäß § 20 Absatz 1 Nummer 7 Luftverkehrs-Ordnung (LuftVO), in: Deutsche Flugsicherung (DFS) (Hrsg.): Nachrichten für Luftfahrer, 1-786-16, BMVI Referat LF 18, Bonn, 2016, S. 2.
[14] Vgl. Frankfurter Allgemeine: Flugsicherung will Führerschein für Drohnen, www.faz.net, 13.04.2016, abgerufen am 20.04.2016 unter: www.faz.net/aktuell/rhein-main/drohnen-fuehrerschein-wegen-kollisionsgefahr-mit-flugzeugen-14176365.html.
[15] Vgl. als ein Beispiel einer flugfertigen Drohne die Phantom Serie des Herstellers DJI, die auf direkt auf der Homepage bestellt werden kann: DJI: Phantom, unter: www.dji.com/de/products/phantom, abgerufen am: 05.05.2016.
[16] Seiler, Ines: Gemeinsame Grundsätze des Bundes und der Länder für die Erteilung der Erlaubnis zum Aufstieg von unbemannten Luftfahrtsystemen gemäß § 16 Absatz 1 Nummer 7 Luftverkehrs-Ordnung (LuftVO), in: DFS (Hrsg.): Nachrichten für Luftfahrer, 1-281-13, BMVBS Referat LR 24, Bonn, 2013, S.1.
[17] Eigenes Interview mit Coorporate Marketing Director, SpectAir Group GmbH, am 04.07.2016 in Berlin.
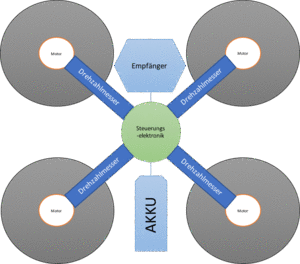
90% aller am Markt verfügbaren Drohnen sind Quadrokopter.[1] Diese Bezeichnung wird für Fluggeräte verwendet, die über vier auftriebgebende Rotoren verfügen. Die Anzahl der Rotoren bildet ein weiteres Unterscheidungsmerkmal bei allen rotorbetriebenen Fluggeräten. Dabei ist die Anzahl der Auftrieb verleihenden Rotoren namensgebend für das Fluggerät. Während bei einem Quadrokopter vier Rotoren koaxial angeordnet sind, gibt es Hexa- oder Oktokopter, die serienmäßig über sechs oder acht Rotoren verfügen. Die Anzahl der Rotoren kann darüber hinaus auch weiter variieren. Alle diese Fluggeräte werden auch als Multirotorgeräte bezeichnet[2] wodurch nominell auch eine Abgrenzung gegenüber Fluggeräten mit einem Rotor erfolgt. Helikopter verfügen über nur zwei Rotoren und könnten daher nominell zu den Multirotorgeräten gezählt werden. Technisch sind jedoch Multikoptergeräte gegenüber Helikoptertechnologien einfacher aufgebaut. Obwohl ein Helikopter ebenfalls einen zweiten Rotor (Heckrotor) benötigt, hat er mit der technischen Bauart der Multikoptergeräte wenig zu tun.[3]
Bei den Multikoptergeräten werden die Rotoren jeweils von einem Antriebsmotor angetrieben.[4] Die Steuerung übernimmt eine zentral angebrachte Steuerungselektronik, die jeweils mit Hilfe eines Drehzahlreglers die einzelnen Motoren und damit die Rotoren ansteuert. "Der Flugcontroller steuert dann die komplexe Flugmechanik und Höhenstabilisierung und erzeugt ein ausgehendes Signal zu den sechs elektronischen Geschwindigkeitsreglern (ESCs) und steuert jeden Motor individuell."[5]
Die Energieversorgung wird durch einen Akku sichergestellt. Ein Empfänger nimmt die Steuerungssignale der Fernbedienung auf. Der Rahmen und das Gehäuse verbinden die wesentlichen Baugruppen so zu einem Gerät.
Fluggeräte, die dabei weniger als vier Rotoren aufweisen sind flugtechnisch relativ instabil. Erst ab einer Anzahl von vier funktionsfähigen Rotoren ist es ein kontrollierbarer Flug möglich. Durch die Regulierung der Drehzahl in Abhängigkeit zur Anordnung der Rotoren wird das Fluggerät steuerbar. Ab einer Anzahl von acht Rotoren sind die Geräte weniger verbreitet. Zwar gibt es Fluggeräte mit einer Anzahl von zwölf Rotoren, sie bilden jedoch die Ausnahme. Die höhere Anzahl an Rotoren führt zu einer höheren Schubkraft, jedoch auch zu einem größeren Stromverbrauch, was die Flugzeit reduziert.[6] Die genauen Flugzeiten und die Reichweite ist abhängig vom spezifischen Gerät und kann daher nicht pauschalisiert angegeben werden. Generell ist aber davon auszugehen, dass bei einem Maximalgewicht von bis zu fünf Kilogramm bis zu einer Stunde Flugzeit erreicht werden kann. Eine theoretische Reichweite von 10 Kilometer kann durchaus erzielt werden.[7]
Bei Multirotorgeräten, die die Gewichtsgrenze von fünf Kilogramm überschreiten, werden aufgrund des instabilen Flugs bei Ausfall eines Antriebs[8] in der Regel mehr als vier Rotoren verwendet. Um die verbaute, meist sehr teure Nutzlast in Form von Elektronik, Sensorik und Kameras bei größeren Geräten vor einem Absturz zu schützen, wird auf mehrere Rotoren zurückgegriffen. In der Folge sind Multirotorgeräte mit einem Gesamtgewicht zwischen fünf Kilogramm und 25 Kilogramm meist Hexa- oder Oktokoptervarianten. Die Vorteile der Multirotorgeräte in ihrer Verwendung sind der eines Helikopters gleich. Sie besitzen die Fähigkeit, senkrecht zu starten und zu landen und können ihre Position in der Luft halten.[9] Allerdings verfügen Helikopter technisch über einen wesentlichen Vorteil gegenüber Multirotorgeräten. Helikopter können auch bei Ausfall des Motors aufgrund der Autorotation noch kontrolliert landen.[10] In Verbindung mit einer hohen Sinkrate kann ein Helikopter einen stabilen Flugzustand temporär beibehalten. Multikopter hingegen verfügen über indifferente Flugeigenschaften und werden bei Ausfall eines Motors flugtechnisch instabil. Helikopter sind daher innerhalb der Multirotorgeräte technisch gesondert auszuweisen und gegenüber den übrigen Bauweisen abzugrenzen.
____________________________________________________
[1] Vgl. Reichert, 2016, S.13.
[2] Vgl. Venables, Christopher: Multirotor Unmanned Aerial Vehicle Autonomous Operation in an Industrial Environment using Onboard Image Processing, University of Western Australia, Perth/Australien, 2013, S.14-16.
[3] Vgl. Bittner, Walter: Flugmechanik der Hubschrauber, Technologie, das flugdynamische System Hubschrauber, Flugstabilitäten, Steuerbarkeit, 4. Auflage, Berlin, 2014, S.9ff.
[4] Vgl. Venables, 2013, S.1.
[5] Venables, 2013, S.24.
[6] Vgl. Reichert, 2016, S.13; Vgl. Kühn, Martin: Stabilisierung und Verbesserung des Multicopter-Flugverhaltens anhand einer Simulation, Berlin, 2013, S.13.
[7] Vgl. Blyenburgh: RPAS, 2016. S.145.
[8] Vgl. Kühn, 2013, S.4ff.
[9] Vgl. ebd.
[10] Vgl. Taamallah, Skander: Small-Scale Helicopter Automatic Autorotation, modelling guidance and control, Delft/Niederlande, 2015, S.10; Bittner, 2014, S.54f.
Flächenflieger und Starrflügler verfügen konstruktionsbedingt über vergleichbare flugtechnische Eigenschaften eines bemannten Flugzeuges. Für Start und Landung ist mehr Raum nötig, unter Umständen müssen Hilfsmittel verwendet werden. Katapulte und Rampen können einen Start ermöglichen, Netze hingegen zur Landung verwendet werden. Ebenfalls ist ein Start aus der Hand möglich, bei dem das Fluggerät lediglich in die Luft geworfen wird. Unterstützt von der eingebauten Elektronik erlangen diese Fluggeräte einen stabilen Flug durch den Auftrieb der Tragflächen und erreichen eine größere Reichweite und eine deutliche längere Flugzeit als Multirotorgeräte.[1]
______________________________________
[1] Vgl. Austin, 2010, S.35f, 66ff; Reichert, 2016, S.15.
Um die vorteilhaften Eigenschaften der ersten beiden Bauarten von Fluggeräten ausnutzen zu können, wurden hybride Systeme entwickelt.[1] Diese Fluggeräte besitzen Flügel und Rotoren. Die Rotoren sind schwenkbar gelagert und können somit Auftrieb für Start und Landung erzeugen. Nach dem Start werden die Rotoren geschwenkt. Sie dienen dann als Propeller und erzeugen Vortrieb. Das Fluggerät verfügt im Flug über die aerodynamischen Eigenschaften und Vorteile eines Flächenfliegers. Lediglich der Schwebeflug ist im Vergleich zu einem Multikopter eingeschränkt, da die vergrößerte Oberfläche windanfällig ist. Die Phase, in der die Rotoren geschwenkt werden, wird als "Transistion"[2] bezeichnet.
________________________________
[1] Vgl. Austin, 2010, S.40ff.
[2] Reichert, 2016, S.13.
Seltenere, von dieser Bauweise abweichende Fluggeräte, können als Sonderfälle klassifiziert werden. Sie unterscheiden sich baulich von der großen Mehrheit der am Markt vorkommenden Geräte. Subsumiert werden hier Drachen als auch mit der Erde über Kabel verbundene Fluggeräte, Fesselballone oder sogenannte Blimps.[1] Technisch bilden zudem bionische Drohnen zum heutigen Zeitpunkt einen Sonderfall. Bionische Bauweisen basieren im Bereich der unbemannten Luftfahrt auf dem Flügelschlag der Vögel, der möglichst natürlich nachgeahmt wird.[2] Für diese Geräte wird der Begriff Ornithopter verwendet.[3] Diese Technologie verfügt aber zum jetzigen Zeitpunkt noch über keine wirtschaftlich nutzbare Marktreife, es existieren nur Prototypen zu Forschungszwecken.[4] Im Bereich der Freizeitgestaltung gibt es aber bereits am Markt verfügbare Geräte.[5] Vermutlich wird diese Technologie zukünftig große Potentiale entfalten.[6] Mit der Flügelschlagtechnologie wird der Strömungswinkel der Luft wie bei einem Vogel mit jedem Flügelschlag individuell angepasst. Damit kann sowohl Auf- als auch Vortrieb erzeugt werden. Auch ein Gleitflug ist dadurch möglich. Die Fluggeräte sollen durch die leichte Bauweise und den geringen Energieverbrauch mit einer wesentlich längeren Flugdauer betrieben werden können. Vorteilhaft erweisen sich verringerte Emissionswerte und eine unauffällige Silhouette. Diese Fluggeräte sind aus der Entfernung mit bloßem Auge nur sehr schwer als solche identifizierbar.[7]
____________________________________
[1] Als Blimps bezeichnet man automatisch fliegende Luftschiffe, die basierend auf der "leichter als Luft" Technologie noch heute Anwendungen finden. Vgl. Reichert, 2016, S.14.
[2] Vgl. Focus Online: Bionische Roboter-Möwe. Ingenieure imitieren natürliche Flugbewegungen, Video, www.focus.de, 31.03.2011, abgerufen am 14.05.2016 unter: www.focus.de/wissen/videos/bionische-roboter-moewe-ingenieure-imitieren-natuerliche-flugbewegungen_vid_24048.html.
[3]Vgl. Blyenburgh, CURPAS, 2016, S.10.
[4] Vgl. ebd; Die Skala mit der die technische Reife gemessen wird ist das Technology Readiness Level (TRL), übersetzt: technischer Reifegrad, wobei TRL 1 (Beobachtung und Beschreibung des Funktionsprinzips (8-15 Jahre)) das Minimum, TRL 9 (Qualifiziertes System mit Nachweis des erfolgreichen Einsatzes) das Maximun darstellt. Die hier relevante Technologie könnte dabei mit einem TRL 5 angegeben werden: Flugversuche wurden in relevanter Umgebung bereits durchgeführt. Getestet werden beispielsweise Raubvögel simulierende Ornithopter, um Vögelschwärme von Flughäfen fern zu halten.
[5] Vgl. als Beispiele für Ornithopter zu Freizeitzwecken die Produkte des Herstellers bionicbird, die direkt auf der Homepage bestellt werden können: bionicbird: unter: www.bionicbird.com, abgerufen am: 12.05.2016.
[6] Eigenes Interview mit IWS Innovations- und Wissensstrategien GmbH, am 12.05.2016 in Hamburg zum Thema bionische Drohnen, Potentiale und zukünftige Forschung und Entwicklung.
[7] Vgl. Focus Online: Bionische Roboter-Möwe. Ingenieure imitieren natürliche Flugbewegungen, Video, www.focus.de, 31.03.2011, abgerufen am 14.05.2016 unter: www.focus.de/wissen/videos/bionische-roboter-moewe-ingenieure-imitieren-natuerliche-flugbewegungen_vid_24048.html.
Ein zusätzlich entscheidendes Kriterium für die Anwendungsmöglichkeiten und die Parameter von Flugzeit, Flughöhe, Gewicht und Reichweite von Drohnen bildet der verwendete Antrieb.[1] Die große Mehrheit der am Markt verfügbaren, handelsüblichen Drohnen bis zu einem Gewicht von 25 Kilogramm wird von einem elektrischen Antrieb angetrieben.[2] Als Energiequelle dient in der Regel ein Lithium-Polymer-Akku (LiPo), die über eine hohe Energiedichte verfügen und auch in Laptops, Mobiltelefonen oder anderen Endgeräten verwendet werden.
Neben den elektrisch batteriebetriebenen Drohnen gibt es noch weitere Antriebsarten. Solarbetriebene Drohnen verfügen ebenfalls über einen elektrischen Antrieb. Diese Drohnen fliegen in sehr großer Flughöhe über 20.000m und verfügen über eine enorme Reichweite von mehr als 10.000 Kilometern.[3]
Populärer sind Antriebe die auf dem Prinzip eines Verbrennungsmotors basieren. Auch Drohnen von unter fünf Kilogramm können über kleine gasbetriebene Verbrennungsmotoren verfügen. Unterschiedliche Konstruktionen existieren für alle Drohnen bis zu über 1t Gewicht. Besonders die zu erzielenden Reichweiten von bis zu mehr als 3000 Kilometern machen Verbrennungsmotoren für Hersteller interessant.[4]
Auch Jetturbinen und Turbopropeller können als Antriebarten verwendet werden, wenn Geschwindigkeit und Reichweiten für spezielle Drohnen erzielt werden sollen. Erforscht werden auch Wasserstoffantriebe und "Chemische Muskeln", die aufgrund chemischer Reaktionen Energie erzeugen und Drohnen antreiben können.[5]
[1] Vgl. Blyenburgh: RPAS, 2016, S.145.
[2] Vgl. ebd.
[3] Vgl. Blyenburgh: RPAS, 2016, S.145.
[4] Vgl. ebd.
[5] Vgl. ebd.
Parameter wie Flugzeit, Flughöhe, Reichweite, maximales Startgewicht und Gewicht der zu tragenden Nutzlast spielen jeweils eine individuelle Rolle für potentielle Anwendungen. Die gesetzliche Gewichtsbegrenzung für UAS begrenzt heute die Entwicklungsmöglichkeiten dieser Kriterien. [1] Bereits das Maximalgewicht von 25 Kilogramm hat Beschränkungen in den Anwendungsmöglichkeiten zur Folge. Aus technologischer Sicher können schon heute Drohnen mit der bemannten Luftfahrt vergleichbare technische Leistungsdaten, Flugeigenschaften und Anwendungsmöglichkeiten aufweisen.[2] Als restriktiver Faktor wirken bestehende rechtliche Regelungen.
Die mit dem Fluggerät verbundene Nutzlast ist die zweite wesentliche Komponente einer Drohne. Die am weitesten verbreiteten Nutzlasten am Markt sind Kamerasysteme.[3] Diese werden zur Ausrichtung und zur Stabilisierung der Aufnahmen meist über einen Gimbal[4] mit dem Fluggerät verbunden. Die angebrachten Kameras können dabei alle am Markt verfügbaren Geräte sein. Auch können Kameras gesondert für die Fluggeräte entwickelt und verwendet werden. Bei den handelsüblichen RTF sind die Kamerasysteme bereits speziell auf das Gerät abgestimmt. Die angefertigten Bildaufnahmen im Flug sind ausgeglichen und verzerrungsfrei und damit von hoher Qualität.[5] Die Steuerung und Auslösung wird, wie auch bei anderen Nutzlasten, über eine Fernsteuerung ermöglicht. Alle Nutzlasten haben wegen ihrer Form, Größe, Gewicht und Abmessung Auswirkungen auf die Flugeigenschaften und die Aerodynamik der Fluggeräte. Sie sind in Kombination mit dem jeweiligen Fluggerät zu betrachten.[6]
Für die Verwendung möglicher Nutzlasten in der Luft müssen oft individuelle Lösungen geschaffen werden. Eine Taxonomie zu anwendbaren Nutzlasten existiert derzeit nicht. Überbegrifflich lassen sie sich aufgrund der Verwendungsart im Ansatz kategorisieren:
_____________________________________
[1] Ab einem Gesamtgewicht von 25 Kilogramm ist der Einsatz von Drohnen derzeit in Deutschland verboten.
[2] Vgl. Blyenburgh, CURPAS, 2016, S. 5f, 11.
[3] Vgl. Reichert, 2016, S.15, 18.
[4] Vgl. Cheng, 2016, S. 32f; Ein Gimbal ist eine Aufhängung für eine Nutzlast (in der Regel eine Kamera), welche die Bewegungen der Drohne automatisch ausgleicht. Der Gimbal bezeichnet daher in den meisten Applikationen die stabile Kamerahalterung einer Drohne, mit der die Kamera, über verschiedene Achsen gelagert, wackelarme Fotoaufnahmen produzieren kann.
[5] Vgl. Reichert, 2016, S.18.
[6] Vgl. Austin, 2010, S.94ff, 128.
Handelsübliche Drohnen sind in der Regel Träger elektrooptischer Sensorik. Dazu zählen alle Arten von Foto- und Videokameras, die mit Hilfe von verschiedenen Technologien bildgebende Aufnahmen erlauben. Dies können beispielsweise auch Thermal- oder Infrarotkameras[1] und Multispektralkameras[2] sein. Die Bilder werden entweder auf einem Speichermedium in der Drohne aufgezeichnet oder direkt an eine Gegenstelle über Funksignale übertragen.
__________________________________
[1] Thermal- oder Infrarotkameras sind Wärmebildgeräte, die Wellenlängen von 0,7 µm bis 1000µm erfassen. Vgl. Austin, 2010. S.129.
[2] Multispektralkameras nehmen parallel mehrere Spektralkanäle unterschiedlicher Wellenlängen auf, die sich in der Folge auswerten lassen. Vgl. Marks, Matthias; Schmidsberger, Falk; Stolzenburg, Frieder: Optische Sensorik an Multikoptern, in: ATB: Heft 88, 2015, S.151ff.
Davon abgegrenzt sind Nutzlasten zur reinen Datenerfassung möglich. Dazu zählen Geräte, die beispielsweise Emissionswerte messen, Windgeschwindigkeiten erfassen oder Bewegungen aufzeichnen. Radarsysteme kann man ebenfalls dieser Kategorie zuordnen. Die Daten können aufgezeichnet oder über einen Datenlink übertragen werden. Eine Auswertung und Aufbereitung der erfassten Daten findet unabhängig der Drohne statt.[1]
_______________________
[1] Vgl. Austin, 2010, S.139. Diese sensorischen Nutzlasten werden auch als passive Aufzeichnungssysteme bezeichnet.
Drohnen können auch zu Telekommunikationszwecken oder zur Datenübertragung verwendet werden.[1] Dabei werden verschiedene Kommunikations- und Informationstechnologien in Form von Broadcastsystemen zur Anwendung gebracht. Durch Drohnen können so fliegende "Router", ebenso wie "fliegende Funkmasten" entstehen.[2]
_____________________
[1] Zu den Missbrauchspotentialen siehe 3.3.11 Spionage.
[2] Vgl. Zeit Online: Facebook präsentiert Internet-Drohne, www.zeit.de, 31.07.2015, abgerufen am 10.03.2016 unter: www.zeit.de/digital/internet/2015-07/facebook-mark-zuckerberg-drohne-aquila.
Andere Nutzlasten können physische Einsätze und Aufgaben erfüllen. So lassen sich Werkzeuge verbauen und diese in oder aus der Luft zur in Gang bringen (heute schon: Sprühgeräte zur Ausbringung von Pestiziden und geplant: Sprühmodule zum Streichen von Häuserfassaden) Diese Utility-UAS können äußerst vielfältig sein, da sie sich in Verbindung mit robotischen Systemen für mechanische Anwendungen eignen[1]. Auch die Bedienung von funktionsfähigen Schusswaffen ist denkbar,[2] auch wenn bei gegenwärtigem Technikstand die Präzision beim Einsatz voraussichtlich mangelhaft wäre.[3]
______________________
[1] Vgl. Zeit Online: Facebook präsentiert Internet-Drohne, www.zeit.de, 31.07.2015, abgerufen am 10.03.2016 unter: www.zeit.de/digital/internet/2015-07/facebook-mark-zuckerberg-drohne-aquila.
[2] Siehe dazu 3.3.8Angriff gegen eine Person und 3.3.10 Terroristischer Angriff.
[3] Die Präzision ist der bestimmende Faktor, der sich aus dem Anfangswinkel der ballistischen Kurve und der von aussen auf die Waffe wirkenden Umgebeungsenergien, wie Wind oder Regen, errrechnen lassen müsste. Selbst bei militärischen Luftfahrzeugen ist die Ablage und damit die Abweichung von Zielpunkt und Trefferpunkt nicht präzise genug, um auf wenige Meter genau treffen zu können.
Vielversprechend erscheint die Entwicklung von Transportnutzlastern: UAS werden für diese Zwecke mit Stau- oder Transportraum versehen. Die eigentliche Last kann sowohl im Inneren des Flugkörpers als auch als außen transportiert werden. Die horizontale Beförderung von Gegenständen ist dabei ebenso Anwendungsszenario wie der Transport von Gütern über große Entfernungen.
Große Potentiale werden zukünftig in der Verwendung von multifunktionalen Systemen gesehen. Dazu werden verschiedene Nutzlasten so miteinander kombiniert, dass ein Fluggerät Trägerplattform für unterschiedliche Systeme sein kann. Die Nutzlasten können auch modular ausgetauscht und in verschiedenen Kombinationen adaptiert werden. Ein modularer Aufbau ermöglicht einen schnellen Wechsel durch den Bediener. Damit entstehen Multifunktionsdrohnen, die sich nicht nur für einen einzigen Einsatzzweck eignen, sondern vielfältig verwendbar sind.
Zur Steuerung benötigen alle Drohnen eine Bodenkontrollstation. Diese muss nicht zwangsläufig ein stationärer Ort sein. Der Steuerer selbst kann diese Station sein, der über eine Fernbedienung die Steuerung übernimmt. Die Steuerung des Fluggerätes und die Bedienung der verbauten Nutzlast sind von unterschiedlichen Orten aus denkbar. Sowohl aus einem Fahrzeug am Boden, wie aus einem Flugzeug kann eine Drohne bedient werden, sofern eine Telekommunikationsverbindung zur Übertragung der Steuerungseingaben existiert. Eine zentrale Rolle kommt dabei der verwendeten Bedienoberfläche zu, über die die Eingaben erfolgen. Das "Interface" für die Funkfernsteuerung kann speziell vom Hersteller für Drohne konzipiert sein. Auch Applikation auf einem Mobiltelefon, Tablet oder PC können diese Bedienoberfläche bilden.